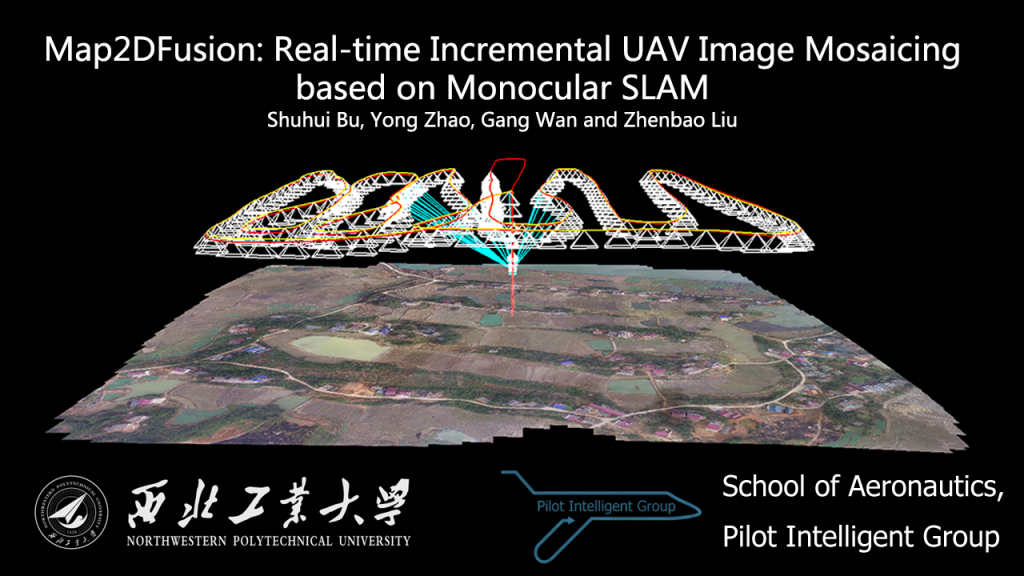
Map2DFusion: Real-time Incremental UAV Image Mosaicing based on Monocular SLAM
We present a real-time approach to stitch large-scale aerial images incrementally. A monocular SLAM system is used to estimate camera position and attitude, and meanwhile 3D point cloud map is generated. When GPS information is available, the estimated trajectory is transformed to WGS84 coordinates after time synchronized automatically. Therefore, the output orthoimage retains global coordinates without ground control points. The final image is fused and visualized instantaneously with a proposed adaptive weighted multiband algorithm. To evaluate the effectiveness of the proposed method, we create a publicly available aerial image dataset with sequences of different environments. The experimental results demonstrate that our system is able to achieve high efficiency and quality compared to state-of-the-art methods.
Source code of Map2DFusion can be downloaded at: https://github.com/zdzhaoyong/Map2DFusion
1. Demonstration
Online video is available at: https://www.youtube.com/watch?v=-kSTDvGZ-YQ
The video is composed of three parts:
- Part 1: Real-time reconstruction with GPS (Sequence phantom3-village)
- Part 2: Experiment on Challenging Environment (Sequence phantom3-grass)
- Part 3: Ground Control Station Intergreted Map2DFusion (Sequence gopro-npu)
2. Results on NPU DroneMap Dataset
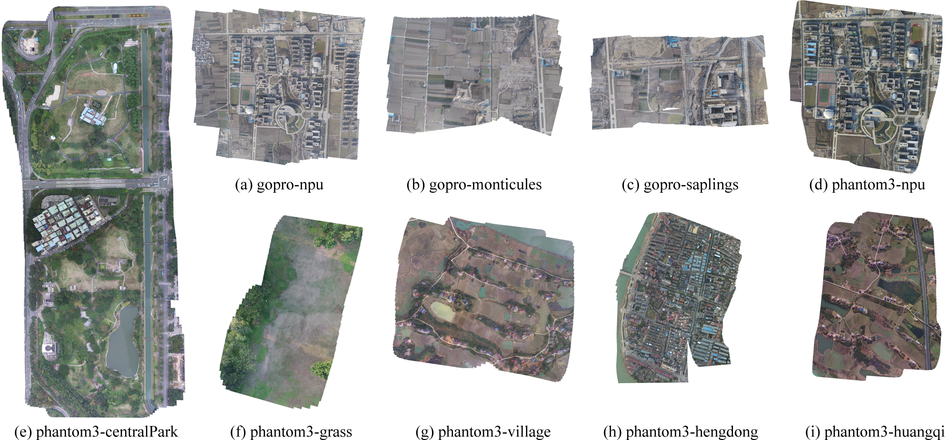
An evaluation of our system is performed over the NPU DroneMap dataset, where thumbnails of the results are shown in the figure below.
3. Downloads
- video: YouTube
- Source code: https://github.com/zdzhaoyong/Map2DFusion