ArDrone Autoflight Toolkit
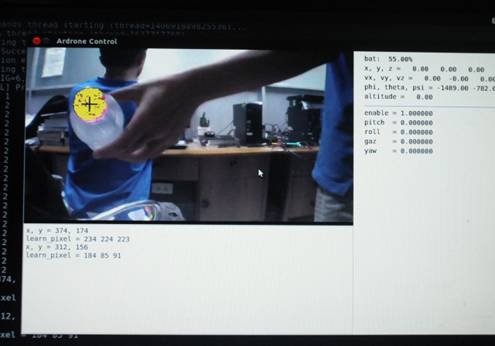
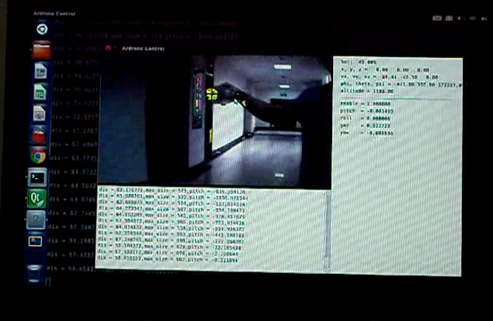
This program is a automatic flight toolkit for ArDrone 2. We implenented 5 flight tasks. They are [0] tracking color block, [1] tracking Aruco marker, [2] Flight along corridor, [3] Recorder video, [4] Auto landing.
The source is based on Tomas KRAJNIK’s source code, and Aruco. We fix some bugs, and change the SDL to Qt GUI.
The source code can be downloaded at: https://github.com/bushuhui/ardrone_auto
Requirements:
- Aruco ( included)
- Qt4 (sudo apt-get install libqt4-core libqt4-dev)
- OpenCV (sudo apt-get install libcv2.4)
- ffmpeg (sudo apt-get install ffmpeg libavcodec53 libavcodec-dev libswscale2 libswscale-dev libavutil-dev libavutil51)
Compile:
cd marker
make
cd ..
make
Usage:
./ardrone_auto.e mode
[0] ColorTrack
[1] DetectMarker
[2] VanishPoint
[3] RecordVideo
[4] Landing
examples:
./ardrone_auto.e 0 (Tracking a color block)
./ardrone_auto.e 3 (Record video to file)
keyboard key:
[Enter] take off / land
[Space] auto-flight / manually
[a] yaw -
[d] yaw +
[Left] roll -
[Right] roll +
[Up] pitch -
[Down] pitch +
[s] hight +
[w] hight -
[z] camera 0
[x] camera 1
[p] screen capture
Plateform:
Only test on Linux Mint 16 64-bit.
Issues:
If can not connect to ArDrone2, please check ‘ardone_CImageClient.cpp’, change headerSize = 64 in function CimageClient::DoExecute()
Screenshot: