Dynamic Path Planning
Introduction
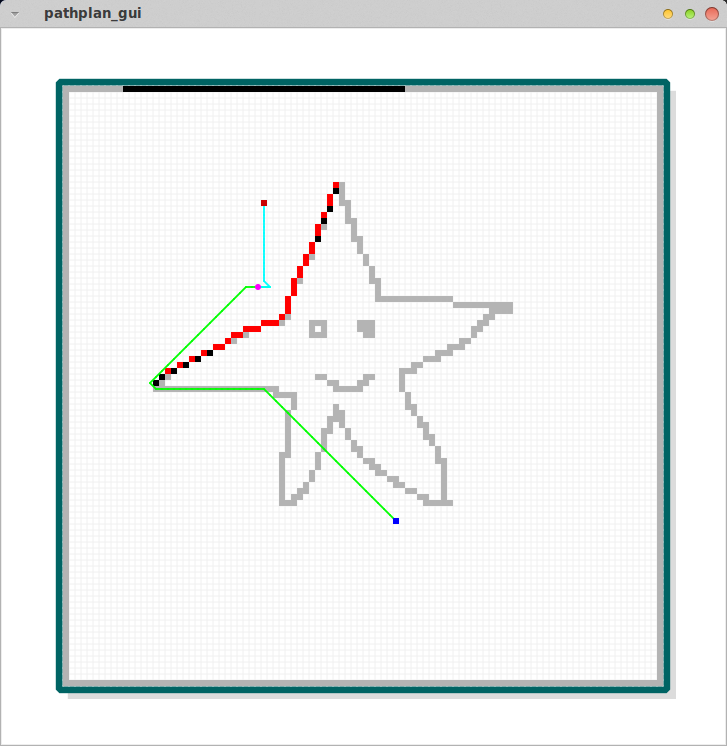
This program demonstrates how to dynamically plan a path from a begin point to an end point, where the environment is incrementally scanned. The simplest A* algorithm is used to plan a path from current position to destination using currently scanned map. Different with traditional path planning, it can plan route for completely unknown environment.
The source code can be downloaded at: https://github.com/bushuhui/dynamicPathPlanning
Requirements:
- Qt4 (sudo apt-get install libqt4-core libqt4-dev)
Compile:
qmake pathplan_gui.pro
make
Usage:
./pathplan_gui
Keyboard:
- ‘L’ - load a map
- ‘B’ - Begin dynamic path planning (step)
- ‘N’ - Next step
- ‘H’ - Automatically run
- ‘P’ - A* path planning
- ‘C’ - Clear results
Mouse:
- ‘Right click’ - open menu
- ‘Scroll - up’ - Zoom out
- ‘Scroll - down’ - Zoom in
Plateform:
Only test on Linux Mint 16 64-bit.
Screenshot: