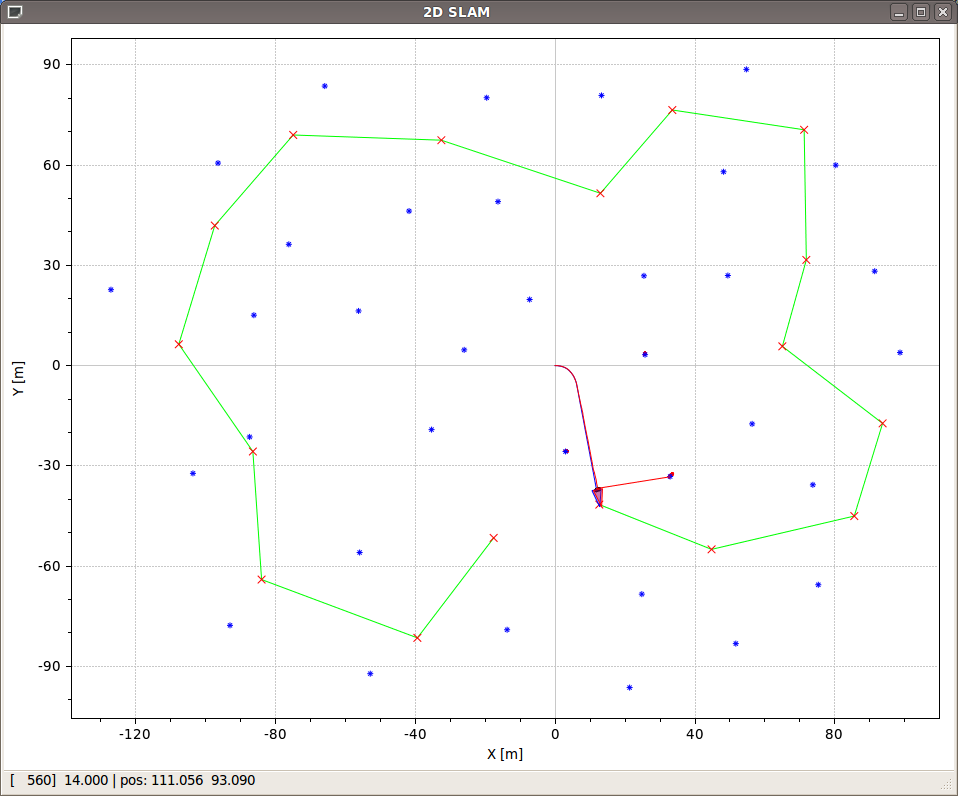
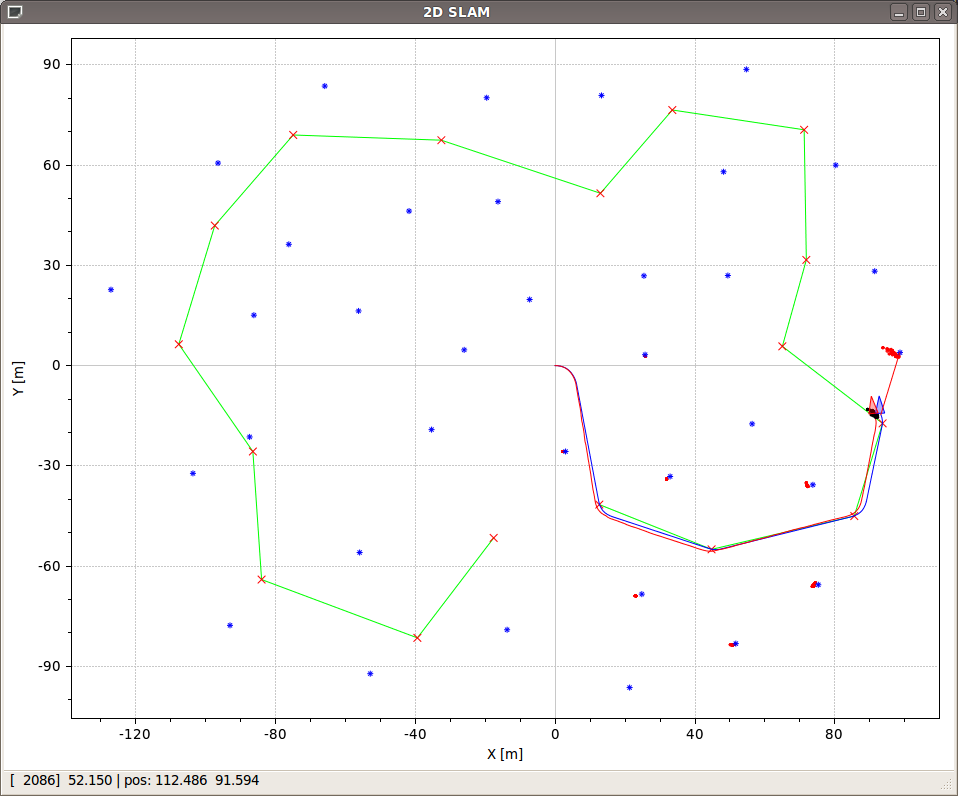
FastSLAM GUI
This program is a pure C++ implementation of FastSLAM 1 and 2. It also integrated a GUI interface which draw current states and observations.
The source is based on yglee source code, and orignal FastSLAM. We add Qt GUI and also fixed some bugs from yglee’s implementation. You can download the source at https://github.com/bushuhui/fastslam .
Requirements:
- Eigen3 ( sudo apt-get install libeigen3-dev)
- Qt4 (sudo apt-get install libqt4-core libqt4-dev)
- QCustomPlot (included, webpage: http://www.workslikeclockwork.com/)
Compile:
make
Usage:
./fastslam.e 1 (FastSLAM 1)
./fastslam.e 2 (FastSLAM 2)
Plateform:
Only test on Ubuntu 10.04 64-bit.
Issues:
- Low performance (Even worse than Matlab version)
- Crash occurs when zooming or moving plot (occasionally)